📝 课程作业记录与进度汇报
姓名: 王昕昊 (Wang Xinhao) 所属: 信韩大学国际大学软件专业 (Shinhan University | International College | Software Major) 🇰🇷 课程: AI人工智能机器人 (AI Robotics)
🇨🇳 本次操作叙述 (Description of Activities)
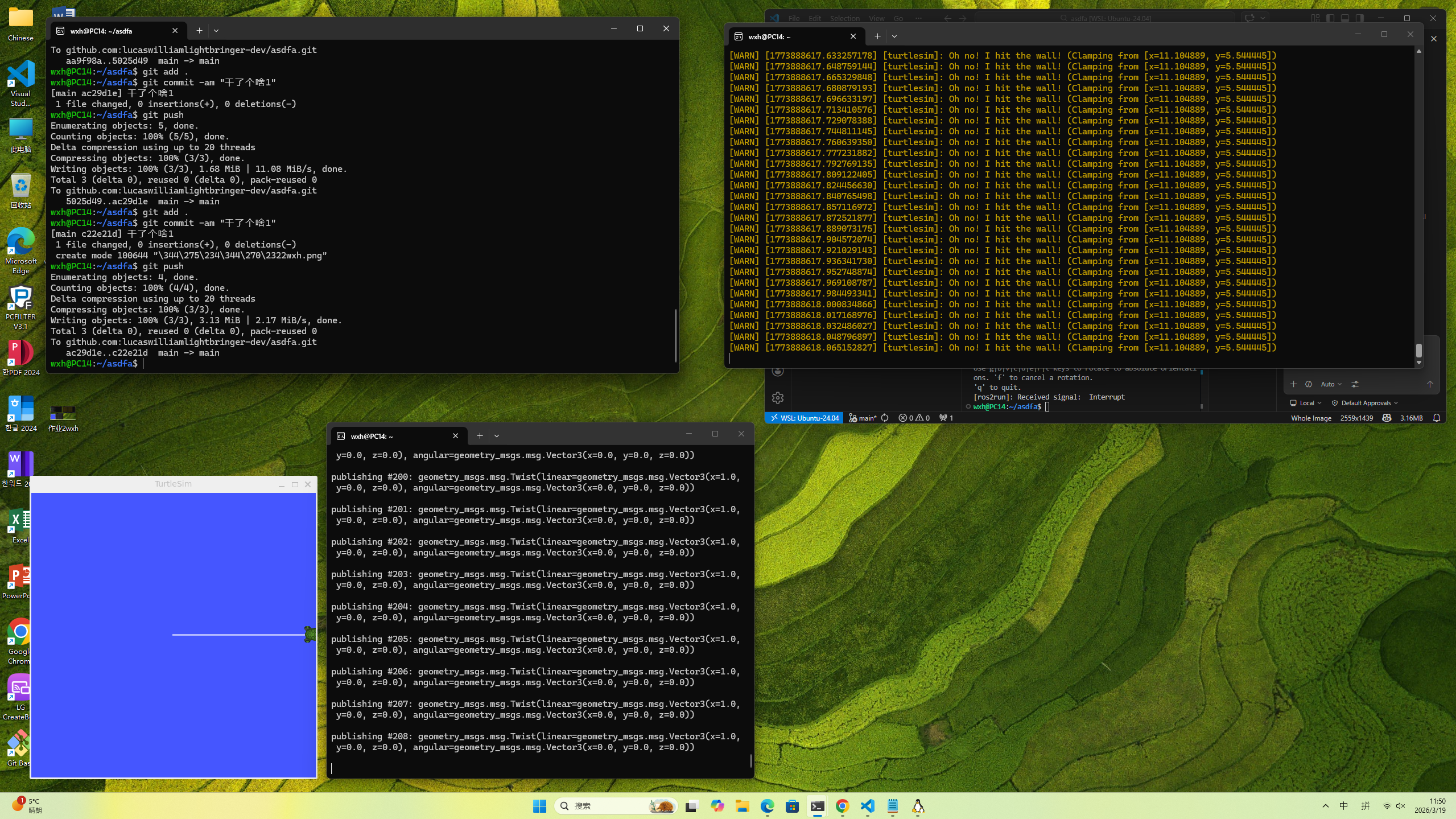
本次主要进行了 ROS 基础通信机制 的测试以及 Git 版本控制 的操作,具体内容如下:
- Git 代码提交与同步:
- 在终端中执行了
git add .和git commit操作,提交信息为 “干了个啥1”。 - 随后执行
git push,将本地更改(包括一个名为wxh.png的文件)成功推送至 GitHub 远程仓库 (lucaswilliamlightbringer-dev/asdfa)。
- 在终端中执行了
- ROS TurtleSim 仿真控制:
- 节点运行: 启动了
turtlesim仿真节点(左下角蓝色窗口),并在屏幕上观察到了绿色的海龟及其运动轨迹。 - 消息发布 (Publishing): 编写/运行了节点向
/cmd_vel话题发布geometry_msgs.msg.Twist消息(中下方终端显示)。 - 运动控制逻辑: 设置了线速度
linear.x = 1.0,角速度angular.z = 0.0。这意味着控制海龟以 1m/s 的速度沿 X 轴直线前进,不进行转向。 - 边界碰撞测试: 由于持续发送向前的速度指令,海龟移动到了仿真环境的边界。右上角终端输出了大量警告信息:
[WARN] ... [turtlesim]: Oh no! I hit the wall! (Clamping from ...)。这表明 ROS 的边界限制机制生效,阻止了海龟移出可视区域,验证了仿真环境的物理约束功能。
- 节点运行: 启动了
🇺🇸 English Summary
Name: Wang Xinhao Activity:
- Version Control: Successfully pushed local commits (including images) to the GitHub repository
lucaswilliamlightbringer-dev/asdfausing standard Git commands. - ROS Simulation:
- Ran the
turtlesimnode to visualize robot movement. - Published
geometry_msgs/Twistmessages withlinear.x=1.0to drive the turtle forward. - Observed the “Wall Collision” behavior where the turtle hit the simulation boundary, triggering
[WARN] ... Oh no! I hit the wall!messages in the console, demonstrating ROS topic communication and simulation constraints.
- Ran the
🇰🇷 한국어 요약
이름: 왕신호 (Wang Xinhao) 활동 내용:
- 버전 관리: Git 명령어를 사용하여 로컬 파일을 GitHub 저장소(
lucaswilliamlightbringer-dev/asdfa)로 푸시(Push)하였습니다. - ROS 시뮬레이션:
turtlesim노드를 실하여 로봇의 움직임을 시각화하였습니다.geometry_msgs/Twist메시지를 발행하여 거북이를 직선으로 이동시켰습니다 (linear.x=1.0).- 거북이가 시뮬레이션 벽에 부딪히는 현상을 관찰하였으며, 콘솔에
[WARN] ... Oh no! I hit the wall!경고 메시지가 출력되는 것을 통해 ROS 통신 및 시뮬레이션 제약 조건을 학습하였습니다.