📝 课程作业记录与进度汇报
姓名: 王昕昊 (Wang Xinhao) 所属: 信韩大学国际大学软件专业 (Shinhan University | International College | Software Major) 🇰🇷 课程: AI人工智能机器人 (AI Robotics)
🇨🇳 本次操作叙述 (Description of Activities)
本次主要进行了 Git 版本控制 的操作以及 ROS 2 TurtleSim 的键盘控制测试,具体内容如下:
-
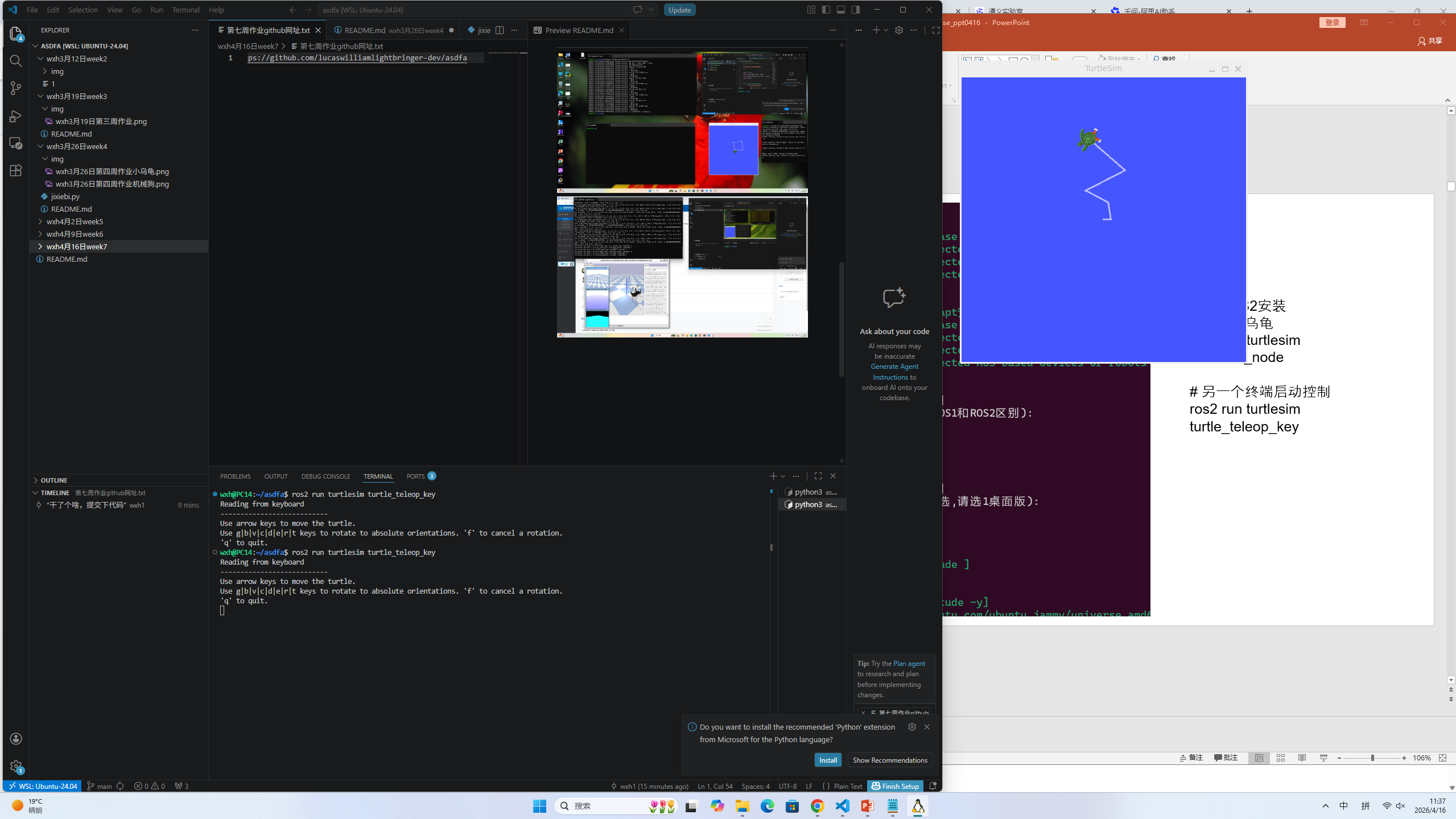
Git 代码提交与同步: 在 VS Code 的集成终端中,执行了 git commit -am “干了个啥,提交下代码” 命令,将本地修改(包括代码和截图)提交到暂存区。 随后执行 git push,将本地分支的更改成功推送至 GitHub 远程仓库 (lucaswilliamlightbringer-dev/asdfa)。终端显示 Writing objects: 100% (5/5)… done,表明推送成功。
-
ROS 2 TurtleSim 仿真与键盘控制: 节点运行: 在 WSL (Ubuntu 24.04) 环境下,执行 ros2 run turtlesim turtlesim_node 启动了海龟仿真节点,并在屏幕上观察到了绿色的海龟。 键盘遥操作: 启动 ros2 run turtlesim turtle_teleop_key 节点,通过键盘方向键向 /turtle1/cmd_vel 话题发布速度指令。 运动轨迹: 通过键盘控制,海龟在仿真环境中绘制出了折线轨迹(如第二张图所示),验证了 ROS 2 话题通信机制及键盘控制节点的有效性。
🇺🇸 English Summary
Name: Wang Xinhao Activity: Version Control: Committed local changes with the message “干了个啥,提交下代码” and successfully pushed them to the remote GitHub repository lucaswilliamlightbringer-dev/asdfa.
- ROS 2 Simulation: Ran the turtlesim_node in a WSL environment. Utilized the turtle_teleop_key node to control the turtle’s movement via keyboard inputs. Successfully visualized the turtle drawing a trajectory on the screen, demonstrating the functionality of ROS 2 topic publishing and subscribing.
🇰🇷 한국어 요약
이름: 왕신호 (Wang Xinhao) 활동 내용: 버전 관리: “干了个啥,提交下代码”라는 메시지와 함께 로컬 변경 사항을 커밋하고, GitHub 원격 저장소(lucaswilliamlightbringer-dev/asdfa)로 푸시(Push)하였습니다.
- ROS 2 시뮬레이션: WSL 환경에서 turtlesim_node를 실행하였습니다. turtle_teleop_key 노드를 사용하여 키보드로 거북이의 이동을 제어하였습니다. 화면상에서 거북이가 궤적을 그리며 이동하는 것을 확인하였으며, 이를 통해 ROS 2의 토픽 통신 기능을 검증하였습니다.