📝 课程作业记录与进度汇报
姓名: 王昕昊 (Wang Xinhao) 所属: 信韩大学国际大学软件专业 (Shinhan University | International College | Software Major) 🇰🇷 课程: AI人工智能机器人 (AI Robotics)
🇨🇳 本次操作叙述 (Description of Activities)
本次主要进行了 KITTI 自动驾驶数据集 在 ROS 2 环境 下的可视化与多传感器数据融合测试,具体内容如下:
-
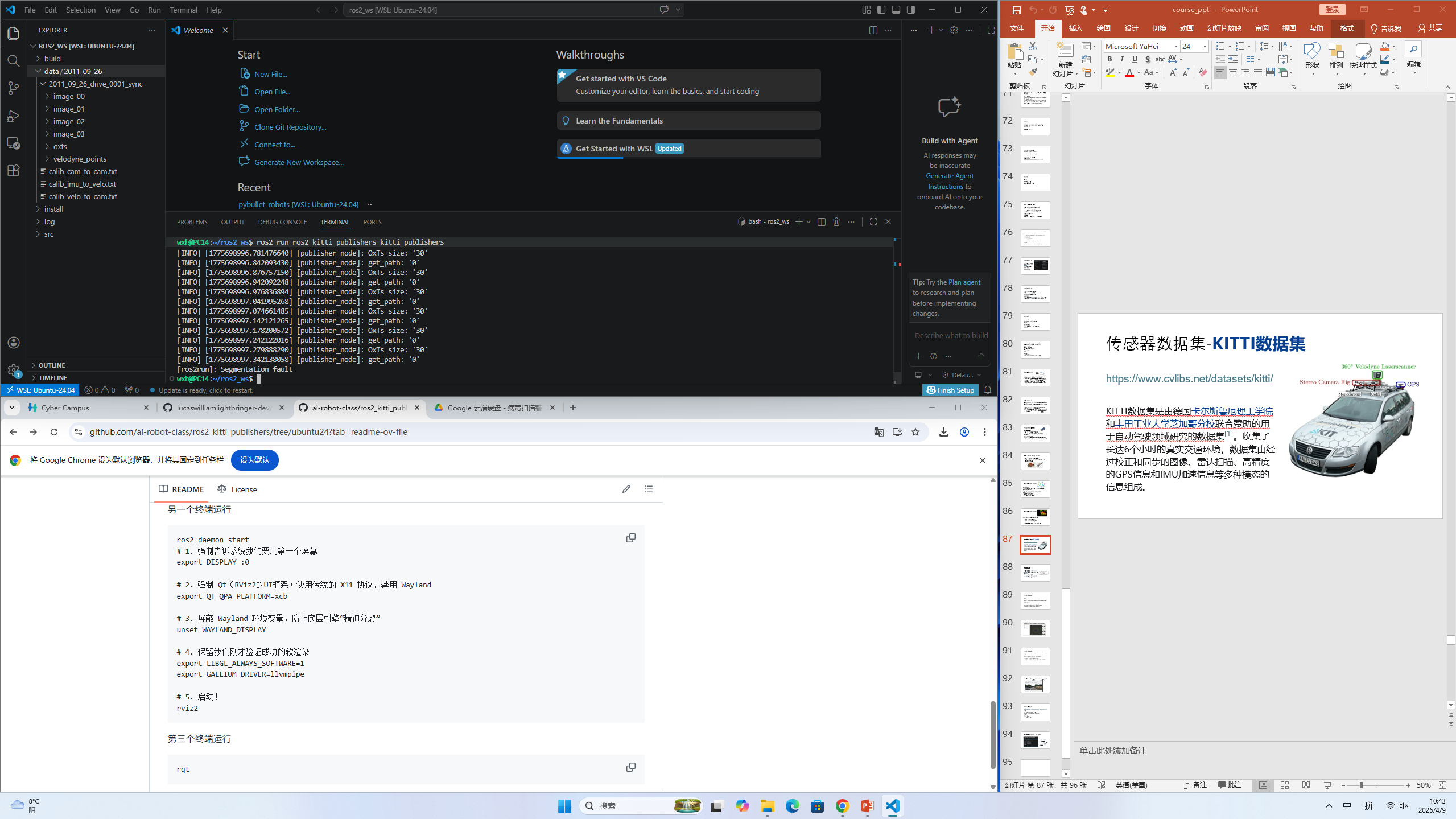
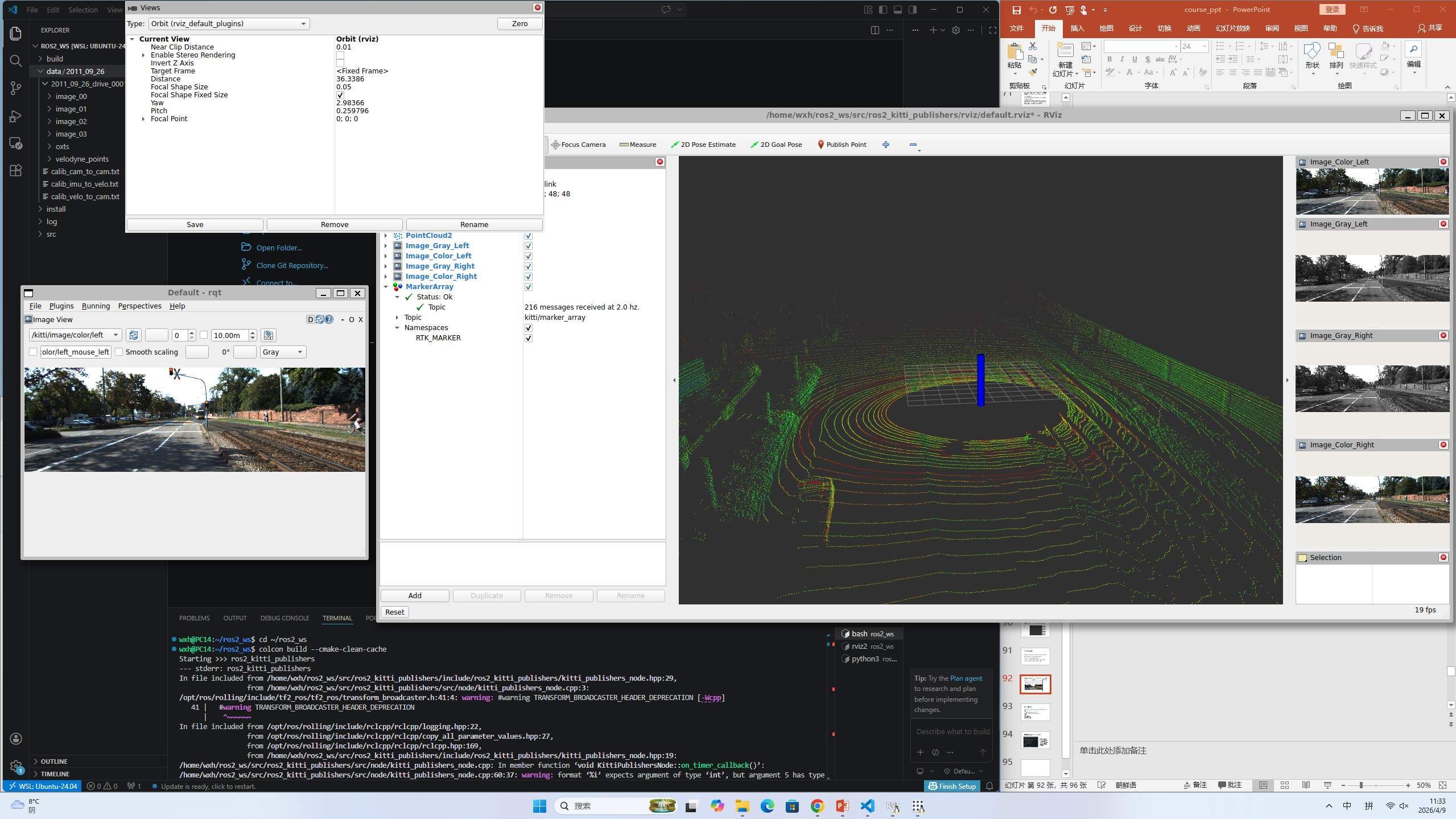
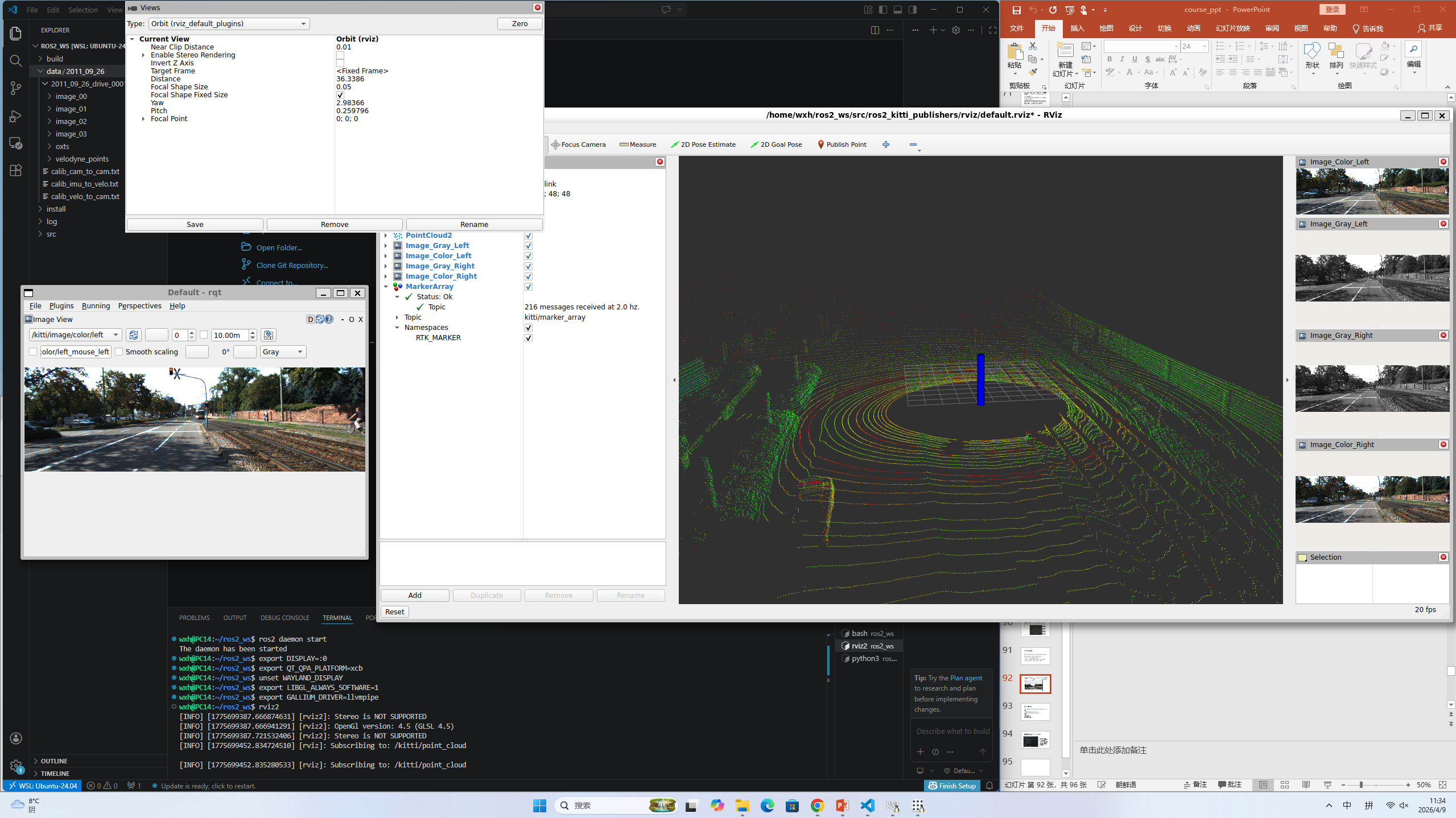
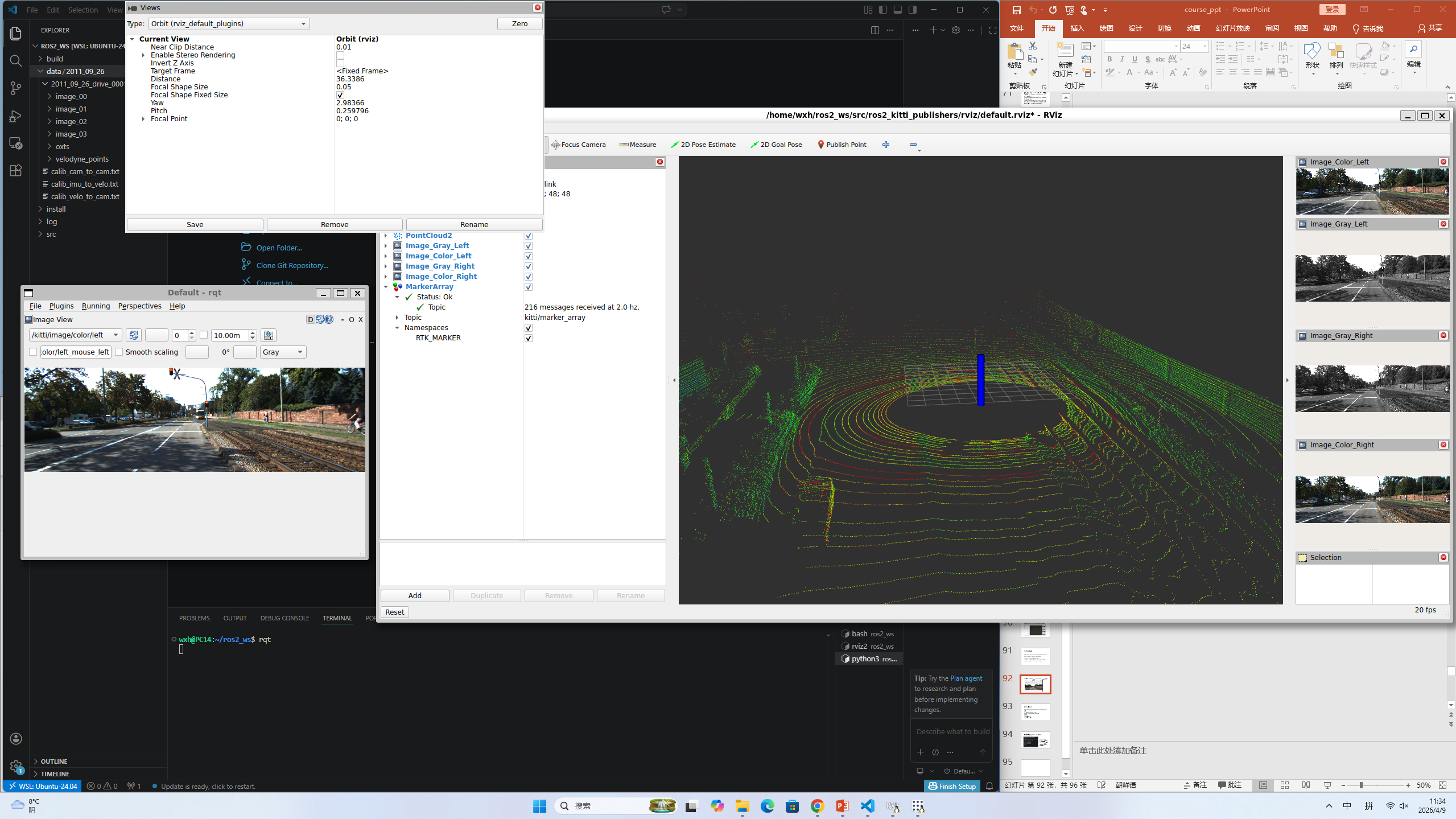
KITTI 数据集 ROS 2 节点发布: 在 VS Code 终端中运行了 ros2 run ros2_kitti_publishers kitti_publishers 命令,启动了 KITTI 数据发布节点。 终端日志显示节点成功运行,循环发布图像和点云数据(例如 Oxts size: ‘30’, get_path: ‘0’),但在运行结束时出现了 Segmentation fault(段错误),提示需要进一步排查内存访问问题。
-
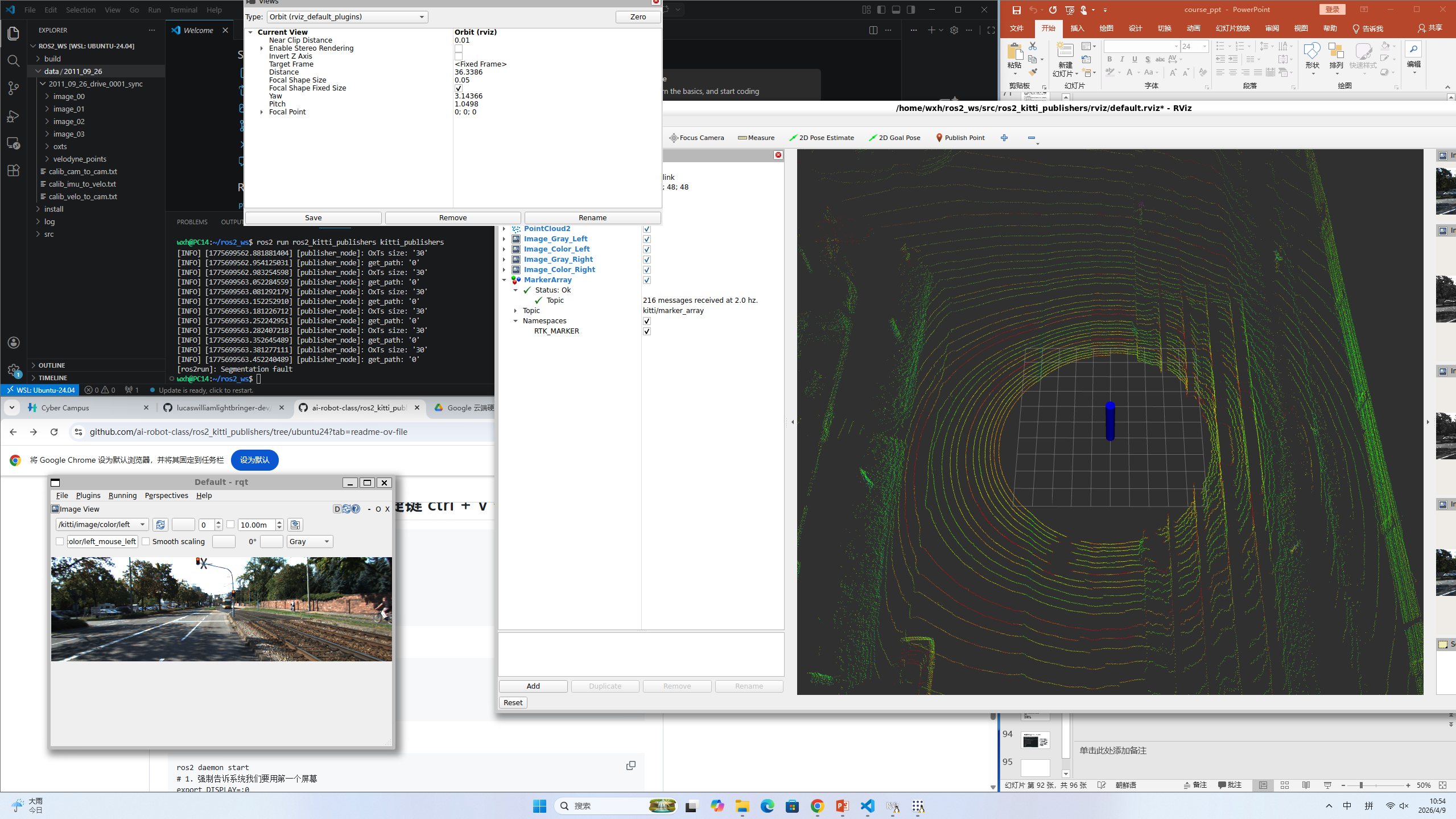
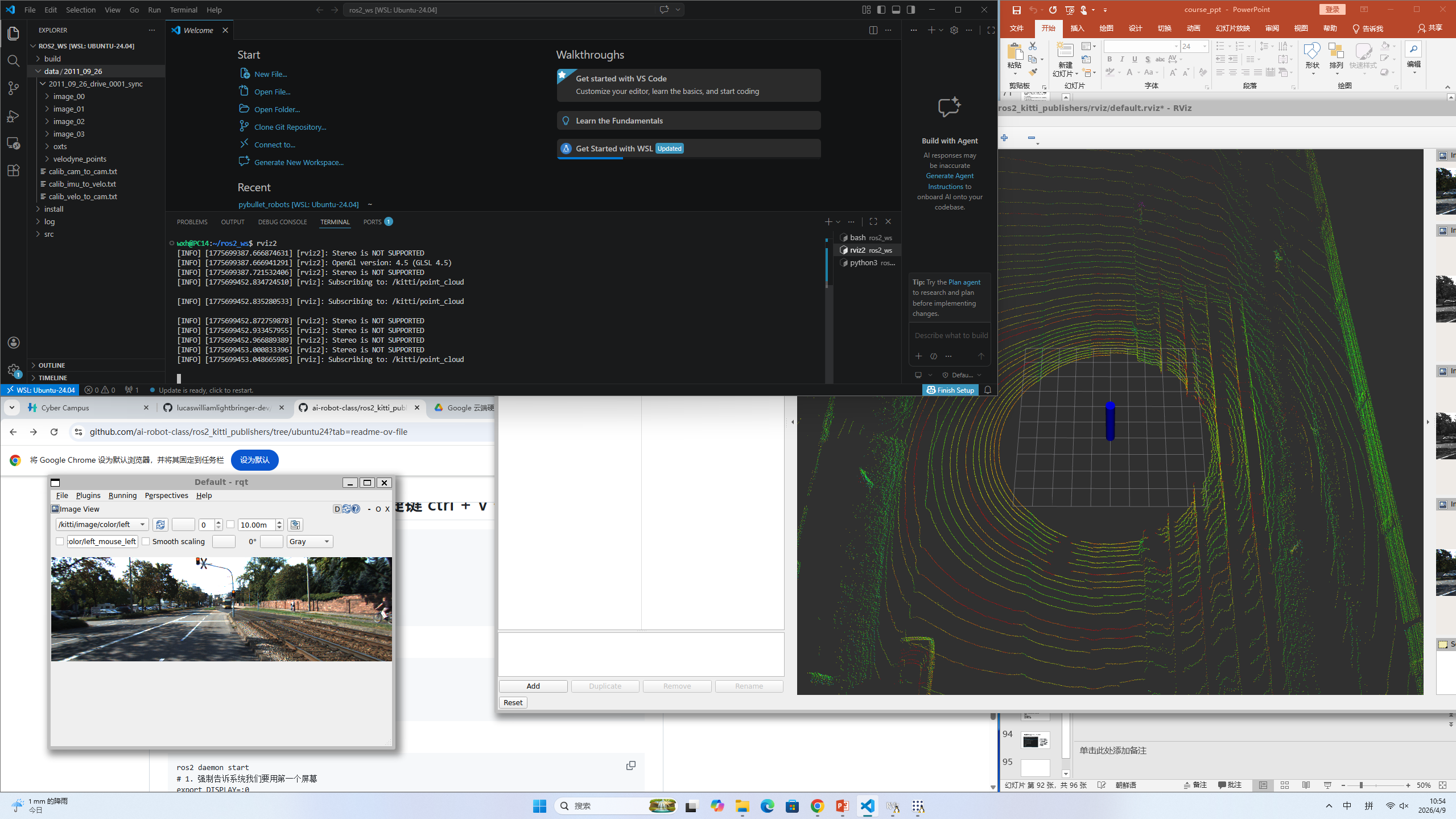
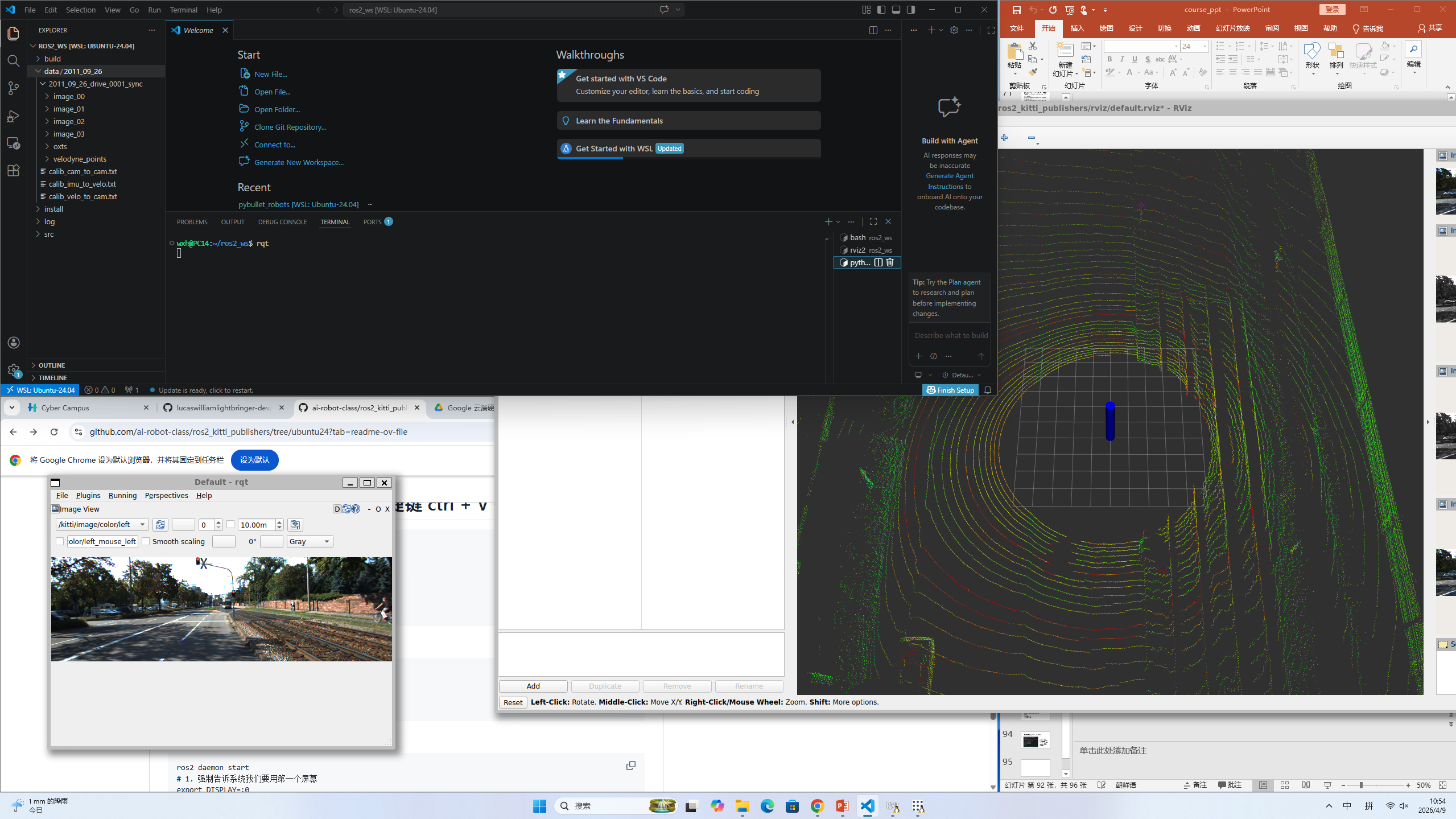
RViz2 点云与图像可视化: 启动 rviz2 加载配置文件,成功可视化了 Velodyne 激光雷达点云(右侧大窗口)。点云呈现出典型的道路场景,能够清晰看到路面、路边树木及建筑物的三维结构。 启动 rqt 图像视图,订阅了 /kitti/image/color/left 话题,成功显示了与点云对应的 左侧彩色相机图像(左下角窗口),画面显示为一条城市道路,包含红绿灯和铁轨。 在 RViz 中添加了多个 Image 显示项,同时展示了左/右灰度图和彩色图,验证了双目视觉数据的同步发布。
-
代码编译与调试: 使用 colcon build 对工作空间进行编译。 终端输出显示编译过程中存在警告信息:warning: format ‘%i’ expects argument of type ‘int’, but argument 5 has type…,表明在 C++ 代码 (kitti_publishers_node.cpp) 的日志打印或字符串格式化部分存在类型不匹配问题,需进行修正。
🇺🇸 English Summary
Name: Wang Xinhao Activity:
- KITTI Dataset Visualization: Executed the kitti_publishers node in ROS 2 to stream the KITTI dataset. RViz2: Visualized 3D LiDAR point clouds (Velodyne) showing road and environmental structures. Rqt: Displayed real-time camera feeds (/kitti/image/color/left), verifying the synchronization between camera images and LiDAR data.
- Code Compilation: Built the workspace using colcon build. Identified a C++ compilation warning regarding format string type mismatch (%i vs argument type) in kitti_publishers_node.cpp. Noted a Segmentation fault upon node termination, indicating a need for debugging memory management.
🇰🇷 한국어 요약
이름: 왕신호 (Wang Xinhao) 활동 내용:
- KITTI 데이터셋 시각화: ROS 2 환경에서 kitti_publishers 노드를 실행하여 KITTI 데이터셋을 스트리밍하였습니다. RViz2: Velodyne 라이다의 3D 점군(Point Cloud)을 시각화하여 도로 및 주변 환경 구조를 확인하였습니다. Rqt: 실시간 카메라 영상(/kitti/image/color/left)을 표시하여 카메라와 라이다 데이터의 동기화를 검증하였습니다.
- 코드 컴파일: colcon build 명령어를 사용하여 워크스페이스를 빌드하였습니다. kitti_publishers_node.cpp 파일에서 형식 문자열 유형 불일치(%i 대 인자 유형)와 관련된 C++ 컴파일 경고를 확인하였습니다. 노드 종료 시 Segmentation fault가 발생하는 것을 확인하여, 향후 메모리 관리 디버깅이 필요함을 파악하였습니다.