📝 课程作业记录与进度汇报
姓名: 王昕昊 (Wang Xinhao) 所属: 信韩大学国际大学软件专业 (Shinhan University | International College | Software Major) 🇰🇷 课程: AI人工智能机器人 (AI Robotics)
🇨🇳 本次操作叙述 (Description of Activities)
本次主要进行了 Docker 容器环境下的 ROS2 仿真运行与键盘控制测试,并成功实现了 TurtleSim 图形交互控制,具体内容如下:
-
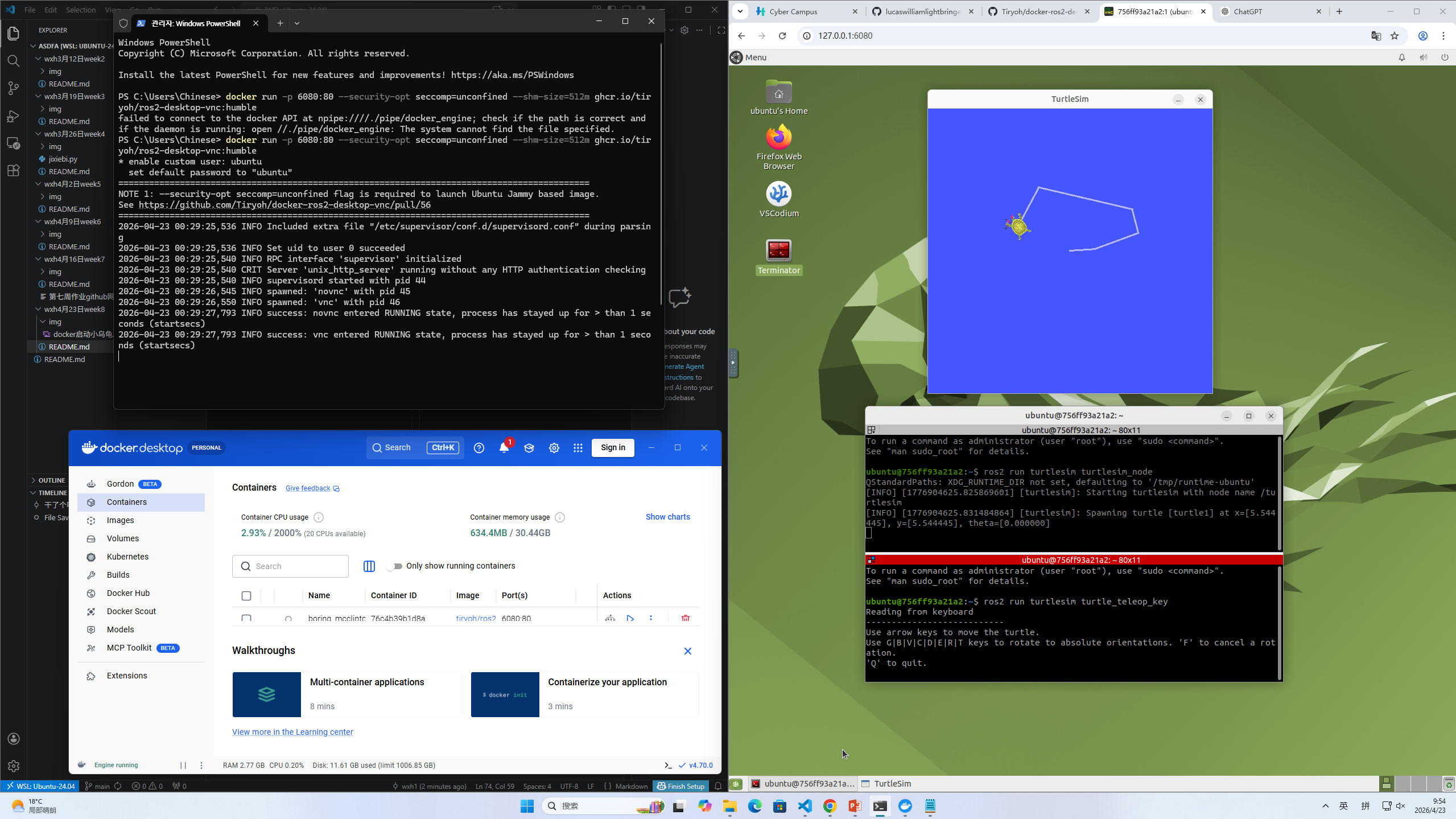
Docker + ROS2 仿真环境搭建: 容器启动: 在左侧 Windows PowerShell 中执行
docker run -p 6080:80 --security-opt seccomp=unconfined --shm-size=512m ghcr.io/ti.../ros2-desktop-vnc:humble命令,成功启动基于 Ubuntu Jammy 的 ROS2 Desktop 容器。 远程桌面访问: 通过浏览器访问127.0.0.1:6080,进入基于 noVNC 的 Ubuntu 桌面环境,实现容器内图形界面的可视化操作。 服务日志: 终端日志显示novnc与vnc服务均成功进入 RUNNING 状态,说明远程图形服务正常运行。 -
ROS2 TurtleSim 仿真测试: 节点运行: 在容器终端中执行
ros2 run turtlesim turtlesim_node,成功启动 TurtleSim 仿真节点。 仿真界面: 弹出了 TurtleSim 窗口(蓝色背景),中心显示一只小乌龟,说明 ROS2 图形节点运行正常。 日志信息: 终端输出了节点启动信息,包括 turtle 生成位置(x≈5.54, y≈5.54, theta=0),验证了仿真初始化成功。 -
TurtleSim 键盘控制(新增): 控制节点运行: 在新的终端中执行
ros2 run turtlesim turtle_teleop_key,启动键盘控制节点。 控制方式: 使用键盘方向键(↑ ↓ ← →)控制小乌龟移动,使用G B V C D E R T等键控制旋转方向。 轨迹绘制: 在 TurtleSim 窗口中成功绘制出不规则轨迹(类似多边形路径),说明速度指令(cmd_vel)已正确发布并被仿真节点接收。 交互验证: 终端提示 “Reading from keyboard”,表明 teleop 节点正常监听输入,实现了 ROS2 节点之间的通信与控制闭环。 -
Docker Desktop 管理与监控: 容器状态: 在 Docker Desktop 界面中可以看到正在运行的容器(映射端口 6080:80)。 资源使用: 界面显示容器 CPU 和内存占用情况,说明容器运行稳定。 可视化管理: 通过 Docker Desktop 对容器进行统一管理和监控,提高开发效率。
🇺🇸 English Summary
Name: Wang Xinhao
Activity:
-
Docker + ROS2 Environment: Launched a ROS2 desktop container using Docker with VNC support. Accessed the container GUI via browser (noVNC) at localhost:6080. Verified that VNC and noVNC services were running successfully.
-
ROS2 Simulation (TurtleSim): Executed
ros2 run turtlesim turtlesim_nodeto start the simulation node. Confirmed the TurtleSim GUI window appeared with a turtle in the center. Checked initialization logs including turtle spawn position. -
Keyboard Control (Teleop): Ran
ros2 run turtlesim turtle_teleop_keyto enable keyboard control. Used arrow keys to move the turtle and rotation keys to change orientation. Successfully drew trajectories in the simulator, confirming correct topic communication. -
Docker Management: Monitored container status and resource usage via Docker Desktop. Ensured stable execution and proper port mapping for GUI access.
🇰🇷 한국어 요약
이름: 왕신호 (Wang Xinhao)
활동 내용:
-
Docker 및 ROS2 환경: Docker를 사용하여 ROS2 Desktop 컨테이너를 실행하였으며 VNC 기반 GUI 환경을 구성하였습니다. 브라우저(127.0.0.1:6080)를 통해 컨테이너 내부 Ubuntu 데스크탑에 접속하였습니다. VNC 및 noVNC 서비스가 정상적으로 실행됨을 확인하였습니다.
-
TurtleSim 시뮬레이션:
ros2 run turtlesim turtlesim_node명령어로 시뮬레이션을 실행하였습니다. TurtleSim GUI 창이 정상적으로 표시되고 중앙에 거북이가 생성됨을 확인하였습니다. -
키보드 제어 (추가):
ros2 run turtlesim turtle_teleop_key명령어로 키보드 제어 노드를 실행하였습니다. 방향키를 사용하여 거북이를 이동시키고 다양한 궤적을 생성하였습니다. 이를 통해 ROS2 노드 간 통신이 정상적으로 이루어짐을 확인하였습니다. -
개발 환경: Docker Desktop을 통해 컨테이너 상태 및 자원 사용량을 모니터링하였습니다. 컨테이너 기반 ROS2 개발 환경이 안정적으로 동작함을 확인하였습니다.