📝 Week 12 基于Tailscale与Flask的手机端ArUco标记实时识别系统实验
姓名:王昕昊(Wang Xinhao) 学校:Shinhan University 国际学院 软件工程专业 课程名称:AI Robotics & Vision System 实验日期:2026年5月28日
🇨🇳 实验内容概述(Experiment Overview)
本周实验重点围绕手机摄像头远程接入、Tailscale 网络互联、Flask 图像流服务以及 ArUco 标记识别系统展开。 通过 WSL Ubuntu 环境与移动端设备的结合,实现了基于局域虚拟网络的实时图像采集与识别测试,并完成了 ArUco Marker 的检测、ID 验证以及图像保存功能。
整个实验过程同时涉及:
- Ubuntu WSL 开发环境
- VS Code 远程开发
- Flask Web 摄像头服务
- Tailscale 内网穿透
- OpenCV ArUco 识别
- 手机浏览器实时访问
- Python 依赖环境配置
1. Ubuntu + VS Code 开发环境准备
实验过程
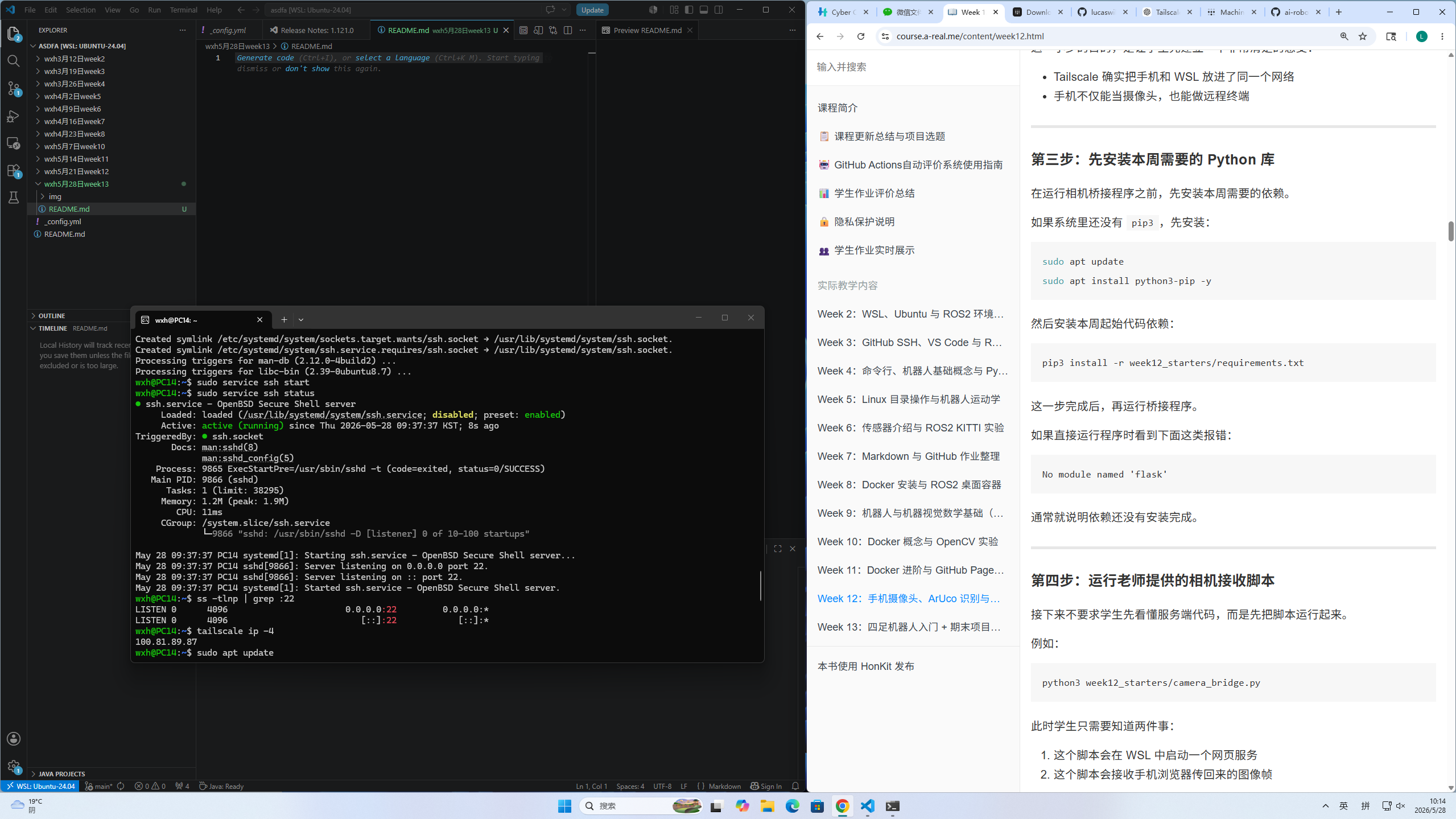
首先在 Windows 系统中启动 Ubuntu 24.04 WSL 环境,并通过 VS Code 连接 Linux 工作区。
随后创建 week12_starters 项目目录,并导入课程所提供的 Python 依赖文件。
实验过程中完成了:
mkdir week12_starters
以及 Python 虚拟环境初始化:
python3 -m venv venv
source venv/bin/activate
同时在 Ubuntu 中安装本周实验所需依赖库,包括:
- Flask
- OpenCV
- NumPy
- SocketIO 等模块
实验结果
- WSL Ubuntu 运行正常
- VS Code 成功连接 Linux 环境
- Python 虚拟环境创建成功
- requirements.txt 依赖安装完成
- Week12 项目目录构建完成
2. Tailscale 网络互联配置
实验过程
本次实验使用 Tailscale 官方网站 构建跨设备虚拟局域网。
在 Ubuntu 中安装并启动 Tailscale:
curl -fsSL https://tailscale.com/install.sh | sh
sudo tailscale up
系统随后分配虚拟网络 IP:
100.81.89.87
手机端与 WSL Ubuntu 同时加入同一 Tailnet 网络,实现跨设备访问。
实验结果
- Tailscale 安装成功
- Ubuntu 成功获取虚拟 IP
- 手机能够访问 Ubuntu 服务
- 实现移动端与 WSL 的网络互通
- 为后续摄像头实时传输提供网络基础
3. Flask 摄像头图像流测试
实验过程
运行课程提供的 Flask 摄像头桥接脚本:
python3 week12_starters/camera_bridge.py
系统自动启动 Web 服务:
http://100.81.89.87:5000
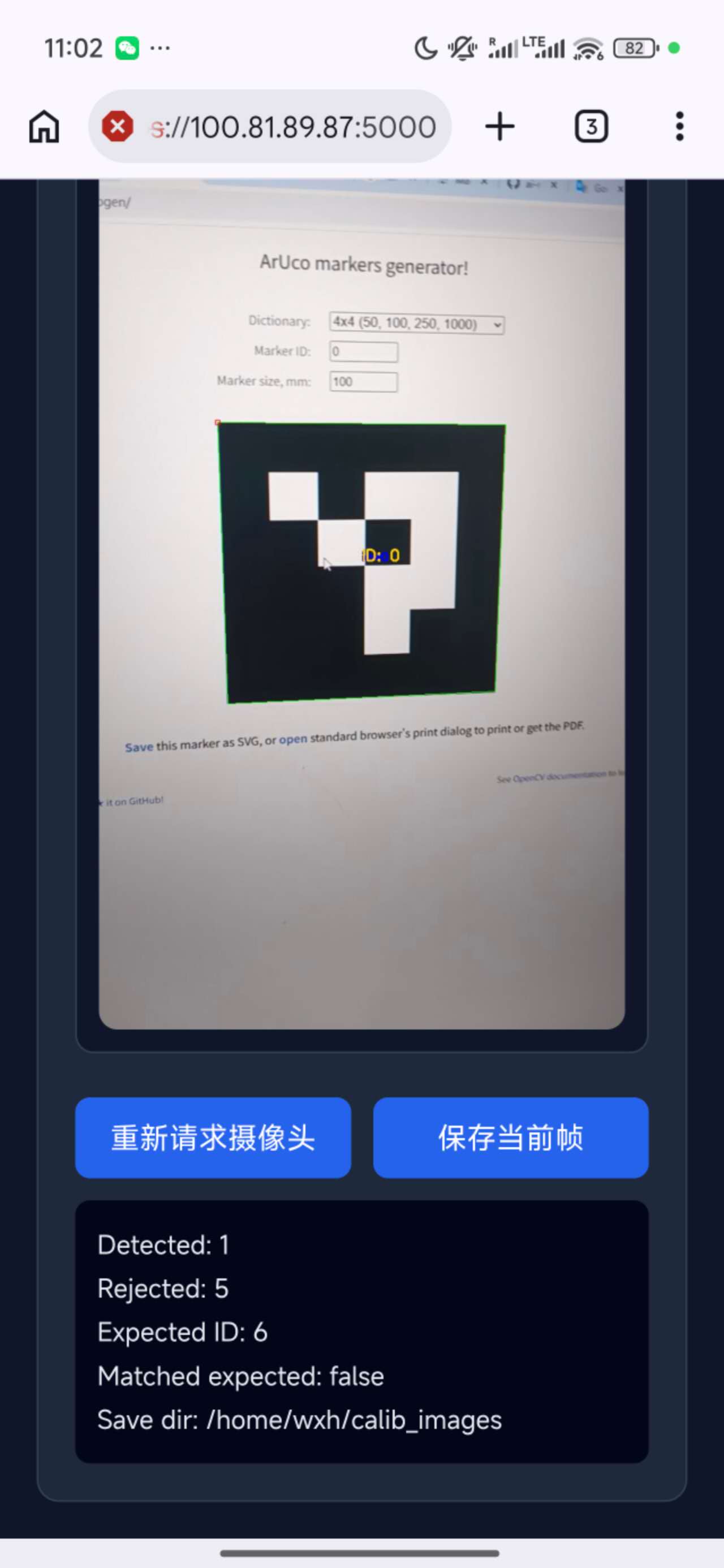
随后在手机浏览器中访问该地址,并授权手机摄像头权限。
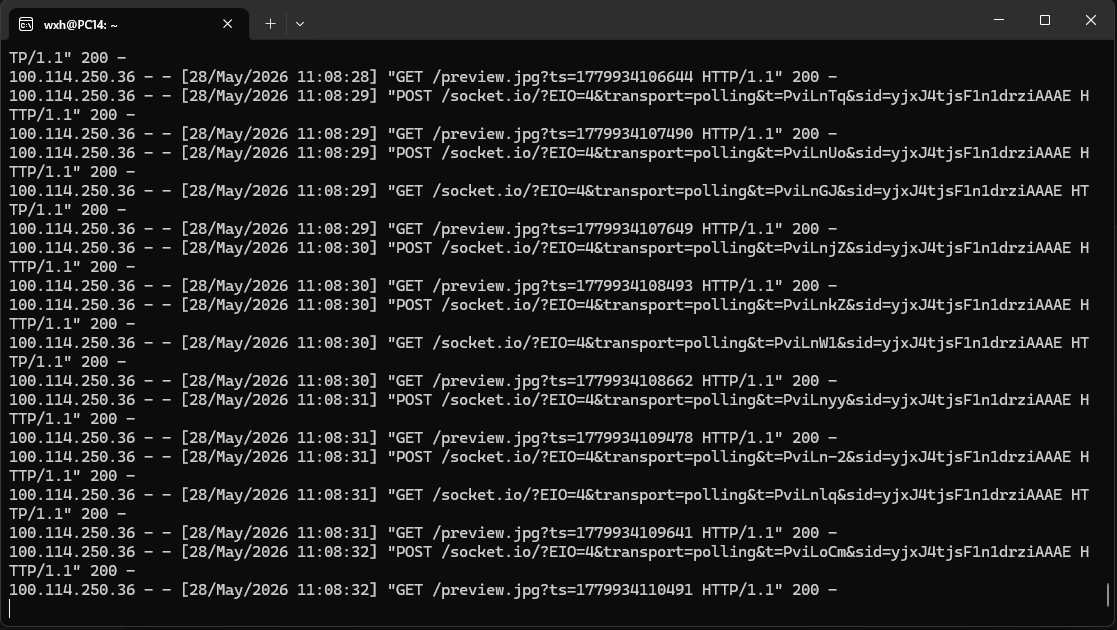
服务器终端实时输出:
GET /preview.jpg
POST /socket.io/
说明 Flask 与 SocketIO 数据通信工作正常。
实验结果
- 手机摄像头成功接入
- 浏览器实时画面传输正常
- Flask 服务稳定运行
- SocketIO 持续传输图像帧
- Ubuntu 成功接收移动端视频流
4. ArUco Marker 识别实验
实验过程
本阶段使用 OpenCV ArUco 模块进行视觉识别测试。
首先通过在线生成器生成:
4x4 Dictionary
Marker ID = 0
的 ArUco 标记图案,并在手机摄像头中进行实时检测。
系统自动识别:
- Marker 边框
- Marker ID
- 目标数量
- 匹配状态
页面实时输出:
Detected: 1
Rejected: 5
Expected ID: 6
Matched expected: false
同时系统支持:
保存当前帧
功能,用于后续标定与数据分析。
实验结果
- 成功检测到 ArUco Marker
- OpenCV 识别功能正常运行
- 实时 ID 检测成功
- 图像保存功能正常
- 手机摄像头与视觉算法联调成功
5. 实验中遇到的问题与解决
Python 环境限制问题
Ubuntu 24.04 中出现:
externally-managed-environment
错误。
原因是新版 Python 采用 PEP668 机制,限制系统级 pip 安装。
解决方法:
python3 -m venv venv
source venv/bin/activate
pip install -r requirements.txt
成功通过虚拟环境完成依赖安装。
🇺🇸 English Summary
Development Environment
A Week12 robotics vision environment was configured using Ubuntu WSL and VS Code. Python virtual environments and dependency packages were installed successfully.
Tailscale Networking
Tailscale was deployed to connect the smartphone and Ubuntu system into the same virtual LAN. A private network IP was assigned successfully.
Camera Streaming
A Flask-based camera bridge service was launched. The smartphone browser successfully transmitted live camera frames to Ubuntu through SocketIO.
ArUco Detection
OpenCV ArUco recognition was tested using a 4x4 marker dictionary. The system detected marker boundaries and IDs in real time.
Experiment Outcome
The experiment successfully verified:
- Mobile camera streaming
- Virtual LAN communication
- Flask web service operation
- OpenCV ArUco recognition
- Remote image acquisition pipeline
🇰🇷 한국어 요약
개발 환경 구성
Ubuntu WSL과 VS Code를 이용하여 Week12 실습 환경을 구축하였다. Python 가상환경 및 필요한 라이브러리 설치를 완료하였다.
Tailscale 네트워크 연결
Tailscale을 이용하여 스마트폰과 Ubuntu를 동일한 가상 네트워크에 연결하였다. 가상 IP가 정상적으로 할당되었다.
Flask 카메라 스트리밍
Flask 기반 카메라 브리지 서버를 실행하였다. 스마트폰 브라우저를 통해 실시간 영상 프레임을 Ubuntu로 전송하였다.
ArUco 마커 인식
OpenCV ArUco 모듈을 사용하여 마커 인식 실험을 수행하였다. 마커 ID 및 경계 검출이 정상적으로 이루어졌다.
최종 결과
본 실험을 통해 다음 기능들을 성공적으로 검증하였다.
- 모바일 카메라 연동
- 가상 네트워크 통신
- Flask 웹 서비스
- OpenCV 기반 시각 인식
- 원격 영상 수집 시스템