下面是已经完全转换成你指定格式后的版本,你可以直接复制到 README.md 或 GitHub Pages 里面使用。
📝 课程作业记录与进度汇报
姓名:王昕昊 (Wang Xinhao) 所属:信韩大学国际大学软件专业 (Shinhan University | International College | Software Major) 🇰🇷 课程:AI人工智能机器人 (AI Robotics) 日期:2026年5月28日
🇨🇳 本次操作叙述 (Description of Activities)
本次实验主要围绕 Docker 容器化 ROS2 开发环境的构建与验证展开,同时完成 Python 依赖库安装、Turtlesim 图形化仿真测试以及 GitHub Pages 实验文档部署。通过 Docker、ROS2、Python OpenCV 环境以及 GitHub Actions 的结合,成功实现了 AI Robotics 实验平台的搭建与在线课程展示。
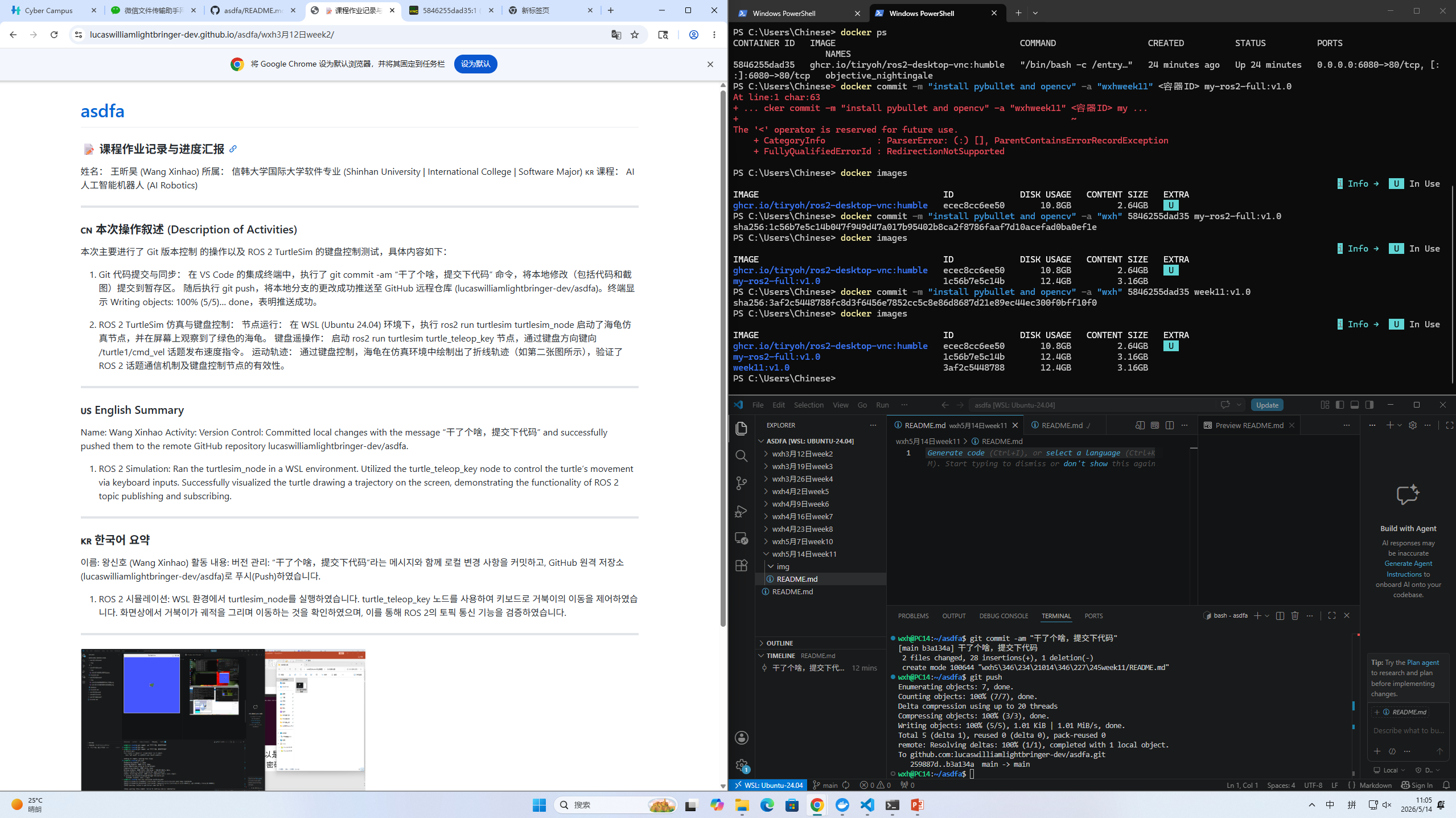
1. Docker + ROS2 图形化开发环境部署
实验内容
本次首先在 Windows PowerShell 中启动 ROS2 Humble Desktop Docker 容器,并开启基于 noVNC 的远程图形界面服务。
执行命令:
docker run -p 6080:80 --security-opt seccomp=unconfined --shm-size=512m ghcr.io/tiryoh/ros2-desktop-vnc:humble
系统成功启动 Ubuntu ROS2 Desktop 图形化环境,并完成 Web 端口映射。
随后通过浏览器访问:
127.0.0.1:6080
进入 noVNC 提供的 Ubuntu Desktop 桌面,实现 Docker 容器内部 GUI 环境的可视化访问。
实验结果
- Docker 容器成功运行
- noVNC 图形桌面能够正常显示
- ROS2 Desktop 图形环境启动成功
- 浏览器远程访问稳定运行
- VNC 与 noVNC 服务均正常监听
2. Python 依赖库与 AI 环境安装
实验内容
为了支持后续机器人视觉识别与物理仿真实验,在 Docker 容器内部安装了多个 Python 第三方依赖库。
执行 pip 安装后,完成以下核心环境配置:
pip install pybullet
pip install opencv-python
pip install opencv-contrib-python
pip install numpy
其中:
pybullet用于机器人动力学与物理仿真opencv-python用于图像处理opencv-contrib-python提供 ArUco 等扩展视觉模块numpy用于科学计算与矩阵运算
实验结果
- 所有 Python 库安装成功
- pip 未出现依赖冲突
- OpenCV 与 PyBullet 可以正常导入
- AI 视觉与机器人仿真环境配置完成
3. ROS2 TurtleSim 图形仿真测试
实验内容
进入 Docker 容器终端后,执行以下命令启动 TurtleSim 仿真程序:
ros2 run turtlesim turtlesim_node
系统成功弹出 TurtleSim GUI 仿真窗口,并显示默认的小乌龟模型。
随后在新的终端中运行:
ros2 run turtlesim turtle_teleop_key
启动键盘遥操作节点,通过方向键控制乌龟移动。
在运动过程中,ROS2 节点持续向 /cmd_vel 话题发布速度控制消息,实现实时运动控制。
实验结果
- TurtleSim 图形窗口正常启动
- 小乌龟运动控制响应正常
- 键盘输入能够实时控制方向
- ROS2 Topic 通信运行稳定
- 仿真轨迹能够正确绘制
4. GitHub Pages 实验网站部署
实验内容
将课程实验记录、Markdown 文档以及图片资源整理后上传至 GitHub 仓库,并通过 GitHub Pages 自动部署实验网站。
课程主页中展示了:
- Week 1 ~ Week 13 实验目录
- 课程作业内容
- Docker 与 ROS2 实验记录
- AI Robotics 学习进度
同时结合 GitHub Actions 实现自动化网页更新。
实验结果
- GitHub Pages 网站部署成功
- Markdown 页面显示正常
- 课程导航结构完整
- 实验图片与文档加载正常
- 在线课程展示平台运行稳定
🇺🇸 English Summary
Docker + ROS2 Environment
A ROS2 Humble Desktop container was deployed using Docker with noVNC graphical support. The Ubuntu desktop environment was successfully accessed through a web browser via port 6080.
Python Dependency Installation
Several essential Python libraries were installed inside the container environment, including:
pip install pybullet
pip install opencv-python
pip install opencv-contrib-python
pip install numpy
These packages provided support for robot simulation, computer vision, and scientific computation.
ROS2 TurtleSim Verification
The Turtlesim simulation node and teleoperation node were launched successfully.
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
Keyboard input controlled the turtle movement correctly, verifying ROS2 topic-based communication.
GitHub Pages Deployment
Course reports and experimental records were uploaded to GitHub Pages. The website successfully displayed the AI Robotics curriculum and weekly assignments online.
🇰🇷 한국어 요약
Docker 및 ROS2 환경 구축
Docker를 사용하여 ROS2 Humble Desktop 컨테이너를 실행하고 noVNC 기반 GUI 환경을 구축하였다. 브라우저를 통해 Ubuntu 데스크탑 환경에 정상적으로 접속하였다.
Python 라이브러리 설치
로봇 시뮬레이션 및 컴퓨터 비전 실습을 위해 다음 Python 라이브러리를 설치하였다.
pip install pybullet
pip install opencv-python
pip install opencv-contrib-python
pip install numpy
모든 패키지가 정상적으로 설치되었으며 AI 실험 환경 구성이 완료되었다.
TurtleSim 시뮬레이션 테스트
다음 명령어를 실행하여 TurtleSim 및 키보드 제어 노드를 실행하였다.
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
키보드 입력에 따라 거북이가 정상적으로 이동하였으며 ROS2 Topic 통신 구조가 올바르게 동작함을 확인하였다.
GitHub Pages 배포
실험 보고서와 수업 자료를 GitHub Pages에 업로드하였다. Week 1~13 과정이 정상적으로 웹 페이지에 표시되었으며 온라인 실험 기록 시스템이 구축되었다.
图 5:课程实验页面与内容展示